無人倉庫を目指すに当たり、ピースピッキングは残された重要な課題です。
ロボットの認識技術が急速に進化していますが、多種多様な商品の取り扱いは、人ならではの万能さだと、
これまでのロボットハンドでは諦められてきました。
フェーズ1
1次ピッキング

これまでのロボットハンドは、1個1個ピースピッキングするため生産性に限界がある
フェーズ2
2次ピッキング

これまでのロボットハンドは、汎用性に欠け1つのロボットハンドで多種多様な商品への対応が難しい
フェーズ3
箱への梱包

これまでのロボットハンドでは、箱詰めの際に他の商品や箱に干渉し破損させてしまう
フェーズ1
1次ピッキング
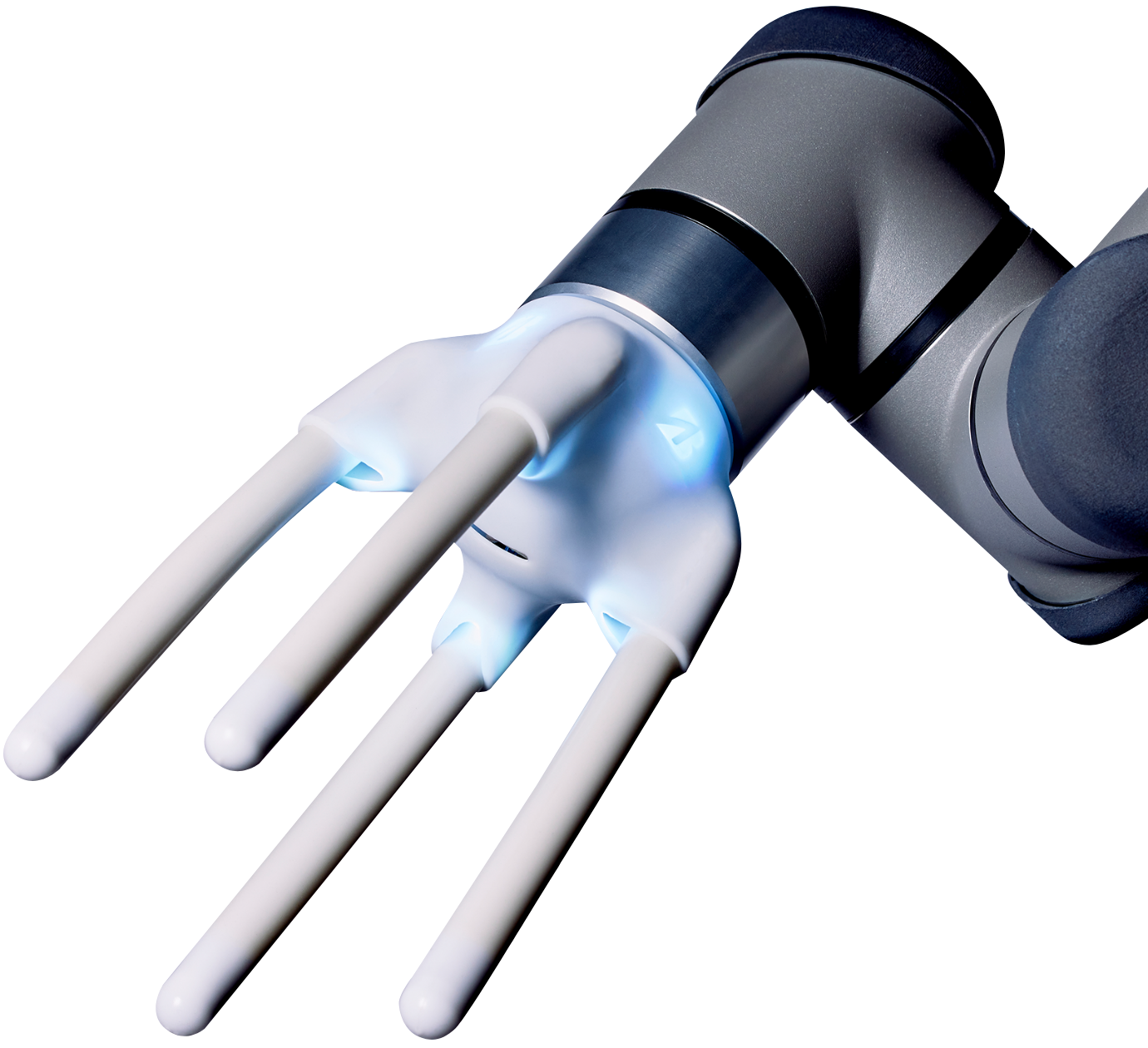
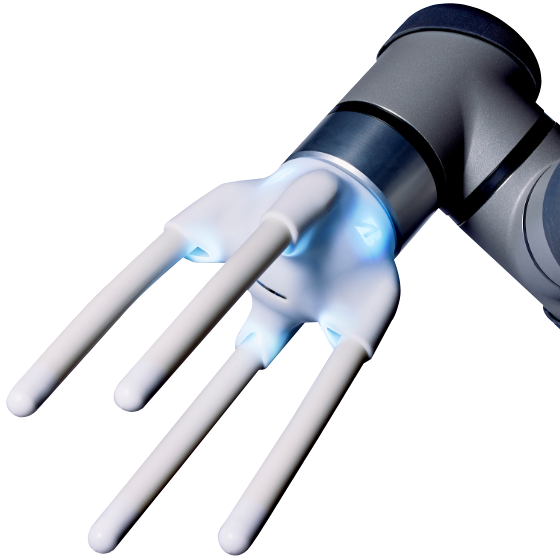
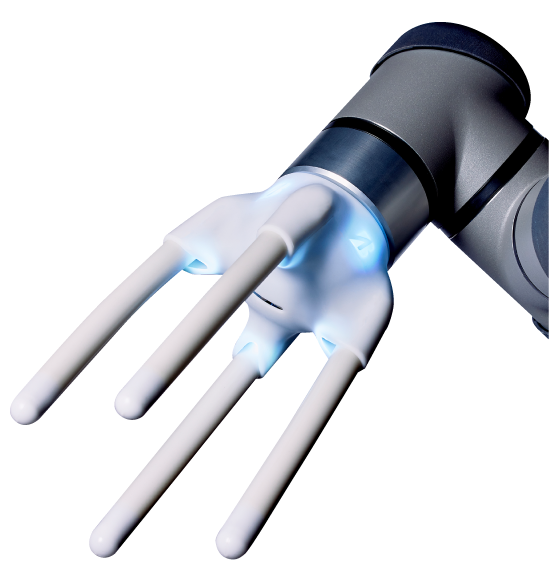
ブリヂストンのソフトロボットハンドは、
商品を複数一気につかめ、高い生産性が期待できます

フェーズ2
2次ピッキング
ブリヂストンのソフトロボットハンドは、1つのロボットハンドで様々な商品をつかめ、ハンドチェンジの時間をミニマイズでき、特注の必要もありません

フェーズ3
箱への梱包
ブリヂストンのソフトロボットハンドは、ゴム人工筋肉そのものの柔らかさにより、箱詰めの際に、たとえ他の商品や箱に干渉しても壊しにくく・壊れにくい