2025.01.14
物流や製造現場でワークの把持や移動といった作業に活用されるロボットハンドですが、近年はカメラの搭載によって、より複雑な作業を可能とする技術も生まれました。ロボットハンドにカメラを搭載することでロボットの作業効率や速度の向上が見込まれる一方、技術面での課題もあります。今回は、ロボットハンドに搭載するカメラの詳しい役割や種類、メリットや課題などについて解説します。
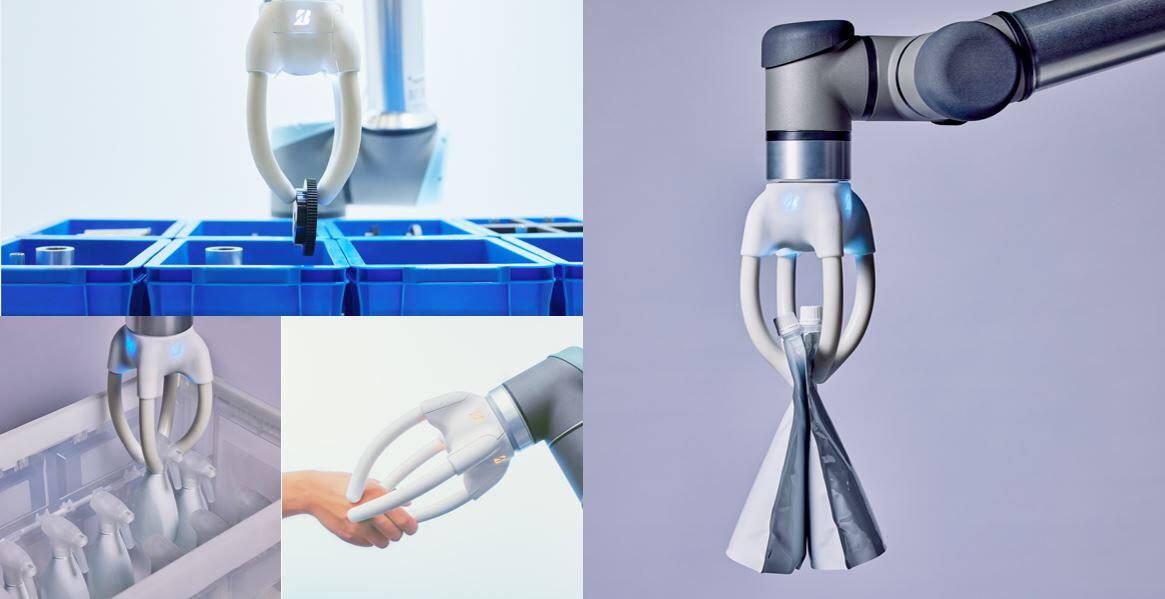
ブリヂストンソフトロボティクスベンチャーズでは強さと柔らかさを兼ね備えたゴム人工筋肉「ラバーアクチュエーター」によって、ヒトの手のように多様なものを器用に掴むソフトロボットハンド「TETOTE」を開発しました。
「柔らかなモノをそっとつかむ」「複数のモノを持つ」「多種多様なモノをつかむ」を可能にしたことで、「つかめない」が原因で進まなかったピースピッキングの自動化を実現します。
ピースピッキングでお悩みの方は、ぜひお気軽にご相談ください。

ロボットハンドが人間の「手」に相当するのであれば、搭載されるカメラは「目」の役割を果たします。
ロボットハンドでワークを把持するためには、まずワークの位置や状態、奥行きなどを正確に認識する必要があります。従来のカメラレスのロボットハンドではティーチングによる位置制御であらかじめ決まった動作を行わせていましたが、ロボットハンドが把持しやすいようにワークの向きをそろえたり、ティーチングに時間がかかったりするデメリットがありました。
しかし、ロボットハンドにカメラが搭載されることにより、複数の製品や部品が混在する中から瞬時に必要なワークのみを正確に識別し、素早く取り上げられるようになりました。現在では、製造や物流の現場におけるピースピッキングや製品の外観検査などで活用され、作業効率の向上に貢献しています。
ロボットハンドに搭載されるカメラはワークの状態や形状に加えて奥行きの情報を得る必要があるため、一般的に3Dカメラが採用されています。3Dカメラには主に以下の3種類があります。
人間の両眼の立体視の仕組みを模倣した構造で、複数台のカメラで表面・奥行きを測定します。安定した距離測定がリアルタイムでできるメリットがあります
光源から照射した光が対象物に反射してカメラに戻ってくるまでの時間から奥行きを測定します。暗所での撮影が可能で、コストも低いといった強みがあります。
プロジェクタで対象物へさまざまなパターンの光を当てて、その歪みをカメラで読み取ることで立体を判断します。高精度での撮影が可能な点が特徴です。
ロボットハンド用カメラの搭載位置は、ロボットハンドに直接搭載するものと、別の場所に取り付けるもので一般的に分けられます。それぞれの技術について解説します。
直接搭載する場合には、一般的にロボットハンドの手首にあたる場所にカメラを設置します。手首部分はロボットハンドの動作への影響がなく、ワークに対して近距離での撮影が可能となるためです。
また、ワークとの接触面を内側から撮影できるよう、ロボットハンドの爪にカメラを仕込んだものもあります。
ロボットハンドにカメラを直接搭載しない場合もあります。ロボットハンドとワークの両方を同時に撮影できる位置にカメラを設置し、作業風景全体を捉えます。
取り扱うワークや作業の内容、求める速度によってスペックの違うカメラを複数台設置する方法もあります。たとえば、2次元画像撮影用カメラと3次元情報取得用カメラを1台ずつ設置する、といった方法です。
ロボットハンドにカメラを搭載することで得られるメリットと、実現できることについて解説します。
カメラを搭載すると、撮影された画像からワークの形状、位置などをロボットが認識できるようになります。そのため把持や移動させるワークの位置決め精度が向上し、ズレが生じてもロボットが自動で調整できるようになるのがメリットです。誤差が生じやすい組み立て作業も実現可能となります。
撮影したカメラからワークの形状を判別できるようになるため、ロボットハンドによって異なる形状のワークが混在する作業も可能となります。たとえば同じライン上に数種類の部品や製品がバラバラに混ざっているような状況であっても、必要なワークを的確にピッキングできるでしょう。
カメラで撮影した画像を処理し、ワークの形状、位置をロボットが認識すると、作業速度の向上も見込めます。ワークの位置情報をロボットがすばやく取得・処理し、ロボットハンドの動作も連動させることで、人間が同じ作業を行うよりも格段に早く完了すると期待されます。たとえば100種類以上のワークから正しい1種類だけをピックアップする、といった、人間でも難しい作業もすばやく実行可能です。
また、作業速度の向上により、生産性の向上や単純作業に従事する人件費の削減にもつながります。
カメラを搭載したロボットハンドによってさまざまなメリットが得られ、作業用ロボットや協働ロボットの実用性もより高められます。一方で技術面での課題もあります。カメラを搭載したロボットハンドで発生する課題について解説します。
カメラを使った画像処理によるロボットハンド制御では、ワークの硬度や変形しやすさまでは考慮できません。そのため、柔らかくデリケートなものや変形しやすいものをそのまま把持しようとすると、ワークの破損や変形につながる可能性があります。
カメラとともに触覚センサーを取り付けて、柔らかい・変形しやすいワークの取り扱い作業に対応する方法もありますが、ロボットハンド自体の重量や質量が増えてしまい、作業範囲やロボットの設置場所に制限が出てしまいます。また、厚みのある金属製の触覚センサーをロボットハンドにつけると指先が太くなるという課題もあります。
カメラの設置場所や位置によっては撮影できる範囲に制限がでてしまい、死角部分での把持や作業に影響を及ぼす場合があります。たとえばある一定の箇所にワークやロボットハンドがある場合に限りワークを認識できなかったり、一定の形状の製品がつかめなかったりするなどのケースが考えられるでしょう。
死角をなくすために複数台のカメラを設置する方法もありますが、画像処理の負荷や難易度が高くなり、ロボットハンドの作業効率が下がってしまう可能性もあります。
カメラを取り付けることでロボットハンドそのもののサイズが大きくなってしまう場合があります。ロボットハンドのサイズが大きくなると、設置場所やライン上での作業内容などに制約が出やすくなります。
以上の3点から、カメラによるロボットハンド制御にもまだ課題があることがわかります。ただし、ワークの柔らかさや変形しやすさを考慮できない点については、次章で紹介するブリヂストンソフトロボティクスベンチャーズの開発したラバーアクチュエーター型ロボットハンド「TETOTE」により克服できると期待されています。

ロボットハンドにカメラを搭載することで多くのメリットが得られる一方で、解決できない技術的な課題も発生しています。画像解析によるメリットはそのままに、柔らかく、変形しやすいワークの取り扱いも可能としているのが、ブリヂストンソフトロボティクスベンチャーズの「TETOTE」です。
ブリヂストンソフトロボティクスベンチャーズの「TETOTE」とは、ブリヂストンの持つゴム製造技術を活かして開発された、ゴムの人工筋肉(ラバーアクチュエーター)を搭載した柔軟なロボットハンドです。「TETOTE」には以下のような特徴があります。
従来のロボットハンドの持つ把持力に加えて、ゴム人工筋肉によってヒトのように「いい感じの力加減」でワークを把持することを実現しました。柔らかい、変形しやすいワークもそっとつかむ、包むように把持する、といった繊細な取り扱いも可能です。
人間の手のようなさまざまなワークを取り扱える高い汎用性も持っています。ゴム人工筋肉により「強さ」と「柔らかさ」を兼ね備え、従来のロボットハンドでは困難とされていた「複数ワークをまとめて持つ」「1台のロボットハンドで多様なワークを取り扱う」といったことも可能になりました。
ゴム人工筋肉で構成される「TETOTE」はロボットハンドそのものが柔らかく、万が一人やワーク、周辺設備に接触しても破損や事故が発生しにくいように設計されています。そのため、協働ロボットハンドとしても選択しやすいといえるでしょう。思わず触って握手したくなるようなデザインは、2023年度グッドデザイン賞も受賞しました。
AIテック企業のアセントロボティクスとの資本業務提携により、ブリヂストンソフトロボティクスベンチャーズの「TETOTE」に、把持対象となるワークを正しく認識、判断できる「目」と「知能」が搭載されました。カメラの画像解析で発生する、以下のような技術課題を解決できます。
・ワークの硬度や変形やすさ、形状に加えて重さ、姿勢も考慮して適した把持と移動が可能
・類似した形状のワークも、外見を特定してピックアップできる
・3D認識によって、把持したワークの適切な置き方も設定できる
強さと柔軟さを兼ね備えた「TETOTE」とアセントロボティクスの「目と知能」がかけ合わさることで、これまで実現が困難とされてきた「ピースピッキングの自動化」が実現できるでしょう。
アセントロボティクス社との提携については以下の記事にて紹介しています。

柔軟な「TETOTE」に、目と知能が搭載されたことで実現できることを紹介します。
「TETOTE」の汎用的な把持力に目と知能が掛け合わさることでピッキング作業の自動化も可能になります。従来のロボットハンドでは同一形状のワークしか把持できず、多種類の中から特定形状のワークを選定してのピッキングや、複数ワークを取り扱うピッキングを苦手としていました。しかし、「TETOTE」に目と知能が加わることで、異なるワークを自動で認識し、それぞれに合った最適な力加減でつかめるようになります。
これにより、段ボールを設置したり移動をさせたりするだけでなく、伝票や緩衝材を入れるといった付帯作業も可能になります。
「TETOTE」に目と知能が加わることで、倉庫の無人化が促進されます。複数個の同時ピッキングによる生産性の向上、ワークごとの爪交換不要という汎用性の高さ、箱やワークに干渉しない力加減と柔軟性を持つロボットハンドによる安全で確実な箱詰め作業などが可能になるとされています。従来のロボットハンドでは難しいとされていた、倉庫の無人化も期待できるでしょう。
ロボットハンドにカメラを搭載することで、人間の「目」に当たる役割を作業用ロボットや協働ロボットへ付与できます。たとえば複数の製品や部品が混在する状況でも、カメラがワークの位置と形状を識別し、ロボットハンドにより必要なワークのみ取り出します。
カメラには奥行きの情報を取得できる3Dカメラが用いられるのが一般的です。カメラを直接取り付ける場合はロボットハンドの手首に、別の場所に取り付ける場合はロボットハンドとワークの両方を撮影できる位置に設置します。
ただし、取り付け位置によって死角が生まれてしまうと認識できなくなるので注意が必要です。また、カメラを取り付けたロボットハンドでも、ワークの柔らかさや変形しやすさまでは考慮できないため、ワークを破損させてしまうリスクもあります。
ただし、ブリヂストンソフトロボティクスベンチャーズの開発したラバーアクチュエーター型ロボットハンド「TETOTE」により、このような課題も克服すると期待されています。強さと柔らかさを兼ね備えたゴム人工筋肉「ラバーアクチュエーター」によって、「柔らかなモノをそっとつかむ」「複数のモノを持つ」「多種多様なモノをつかむ」を可能にしたことで、「つかめない」が原因で進まなかったピースピッキングの自動化を実現します。
ピースピッキングでお悩みの方は、ぜひお気軽にご相談ください。