2024.09.25
ピースピッキング作業を人に代わって行うピースピッキングロボットの役割やメリット、ピッキングロボットとの違いについて解説しています。また、ピースピッキングロボットの構成や導入にあたっての検討事項、代表的なメーカーについても紹介しています。
ピースピッキング作業を人間に代わって行うピースピッキングロボット。従来、多品種の中からピンポイントでものをつかみ出すピースピッキング作業の自動化は困難とされてきましたが、近年急速に開発が進んでいます。
そこで今回、ピースピッキングロボットの役割やメリット、ピッキングロボットとの違いについて解説します。また、ピースピッキングロボットの構成についても詳しく説明するとともに、今後導入するにあたって検討すべきことや代表的なメーカーについても紹介します。
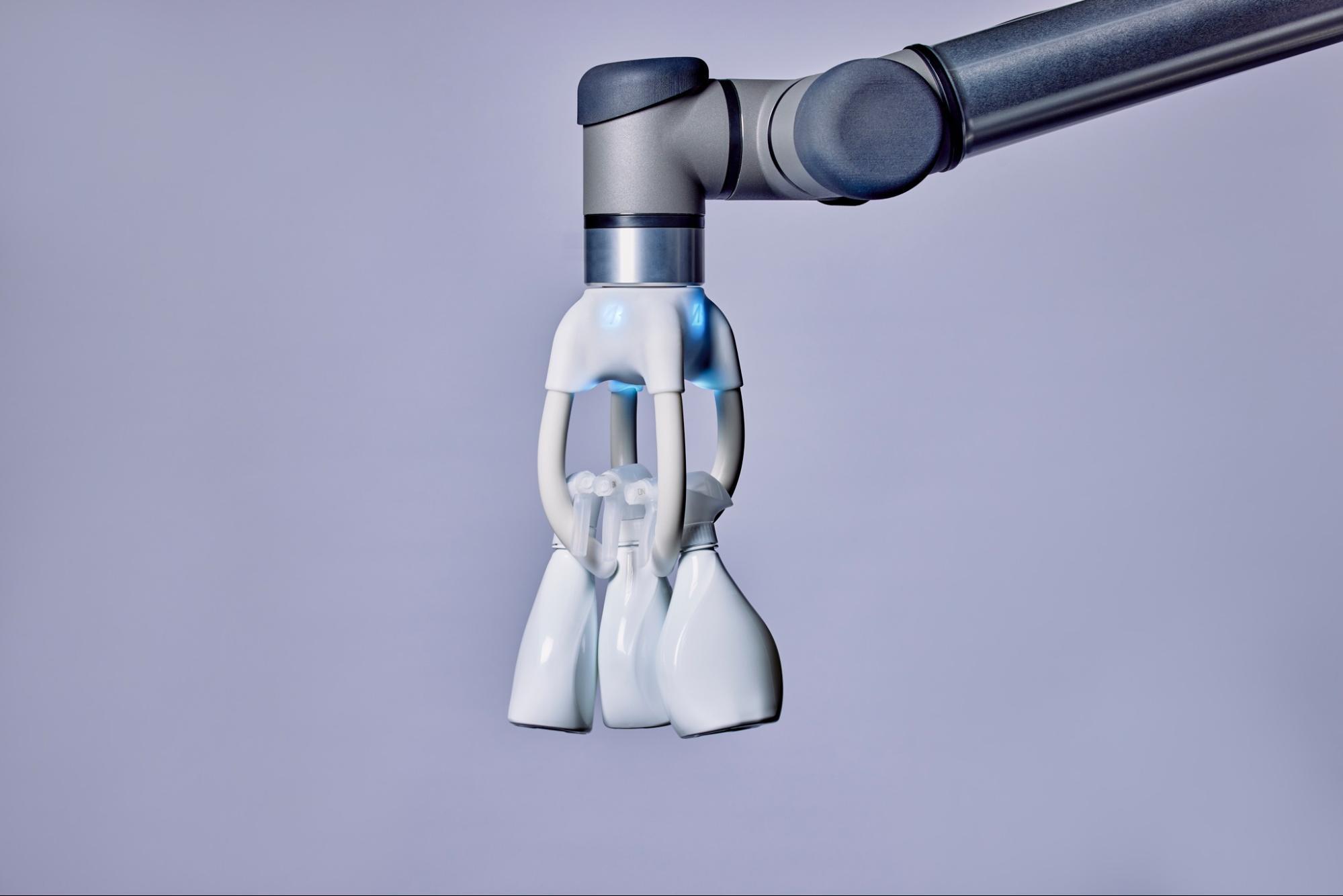
ブリヂストンソフトロボティクスベンチャーズでは強さと柔らかさを兼ね備えたゴム人工筋肉「ラバーアクチュエーター」によって、ヒトの手のように多様なものを器用に掴むソフトロボットハンド「TETOTE」を開発しました。
「柔らかなモノをそっとつかむ」「複数のモノを持つ」「多種多様なモノをつかむ」を可能にしたことで、「つかめない」が原因で進まなかったピースピッキングの自動化を実現します。
1.ピースピッキングロボットとは?ピッキングロボットとの違いも解説
まずはピースピッキングロボットの役割やメリットに加え、ピッキングロボットとの違いについてもみていきましょう。
(1) ピースピッキングロボットとは
ピースピッキングロボットとは、部品や製品などを単品ごとに仕分けてつまみ取るピースピッキング作業を人に代わって行うロボットです。従来ピースピッキングを人が行う場合は、出荷表をもとに必要なピースを必要個数、対象のトレーに格納していました(図1「人によるピースピッキング」)。しかし、単純作業に対して人件費がかかる、ピースの製造部品には重量物が多く負担が大きい、作業効率が悪くなり製造工程の生産効率が低下するなど、非効率なデメリットがありました。
そこで「人によるピースピッキング」の作業に取って代わったのがピースピッキングロボットです。ピースピッキングロボットの導入により、以下のメリットが期待できます。
・単純作業に対し、高速でピースピッキング作業が行えます。
・単純作業にかかる人件費を削減できます。
・重量物が多い製造部品のピッキングも、高速・効率的に実施可能です。
・作業効率が良くなることで、製品の生産効率も向上します。
なお、ピースピッキングについては下記の記事で詳しく解説しています。
ピースピッキングとは?ヒトとロボットによる違いや必要設備を解説
(2) ピースピッキングロボットとピッキングロボットの役割の違い
図2を参考に、工場におけるピースピッキングロボットとピッキングロボットの役割の違いを確認しましょう。
ピースピッキングロボットは、部品類が無造作に収納されたパレットから部品や製品を種類別に取り出して専用パレットに収納・仕分けします(また、生産された製造品の収納箱から製品の種類ごとに収納箱に入れる作業も担います)。
一方、ピッキングロボットは箱や棚単位で物を取出して別の場所に移し替えたり、出来上がった製品を種類ごとに取り込んで、所定の位置に保管する働きをします。
Ⓐデパレタイズロボット
工場では生産ライン稼働のための部材を揃えるために、倉庫の資材保管庫から必要な部材のパレットをデパレタイズロボットが抜き出します。Ⓑピースピッキングロボット
部材(部品や加工品)パッケージからピースピッキングロボットが部品の種類ごとに抜き出し揃えます。Ⓒ組立・加工ロボット
製造部品のパレットを各生産ラインに移送し、組立や加工が行われます。組立・加工はその内容によって人・専用機械・ロボットなどを使用して製造されます。Ⓓピースピッキングロボット
生産ラインから製造された製品を種類ごとにピースピッキングロボットが製品用パレットに揃えます。Ⓔ梱包ロボット
製品パレットに製品が満たされた後は、梱包ロボットが梱包して倉庫に運びます。Ⓕパレタイズロボット
各生産ラインから送られてきた梱包製品箱をパレタイズロボットが倉庫の製品に応じた場所に積み込み整理します。Ⓖ搬送ロボット
AGV、AMRロボットは、生産部材や製品などを積み込まれ、所定の場所まで運搬するロボットです。AGVは、白線などが引かれた位置をたどって動く運搬車です。AMRは、カメラやセンサによって自分の周囲の位置や状況をマッピングし、目的の位置までの走行ルートを決めて動く運搬ロボットです。なお、ピッキングロボットについては以下の記事で詳しく解説しています。
2.ピースピッキングロボットの構成
ピースピッキングロボットの主な構成要素は以下の通りです。
6関節ロボット
左右上下回転の動作を行い、ハンド部分を所定の位置に移動させます。ロボットハンド
人の手に相当する部分です。ロボット6関節部に接続され、ピースをつかむためのグリッパ(指先)部分です。ロボットコントローラ
6軸ロボットを通常動作と緊急動作をさせるコントローラです。3Dカメラ(ロボットビジョン)
人の目に相当する部分です。ピースの状態をカメラで監視します。奥行きや長さなどの状態を知るために3Dカメラを使用します。ロボットビジョンコントローラ
人の頭脳に相当する部分です。3Dカメラの状態から、これまで機械学習したピースの状態を照合して、ピースの置かれている状態を把握します。ロボットハンドコントローラ
グリッパがピースをつかむ情報をハンド部分に指示します。ピースピッキングロボットは、ロボットが目で対象物を把握し、最適な把持方法を考えてロボットハンドで実際につかむという点で、加工・組み立てロボットなどほかの多関節ロボットと異なります。そこで、これらの構成要素のうち、特に重要な「3Dカメラ」「ロボットビジョンコントローラ」「ロボットハンド」に注目していきます。
(1) 目となる3Dカメラ
ピースピッキングロボットの頭脳が正しく機能するためには、ピースの状態を細部まで観察できる目が欠かせません。目はピースの置かれている状況を確認するため、表面の状態や奥行などの細かな情報を得る必要があります。
そのため、ピースピッキングロボットの目には3Dカメラが用いられるケースがほとんどです。また、次の3つの方式が代表的に用いられています。
ステレオ式
複数台のカメラで表面・奥行きを測量します。ToF式
光源から光を当て、カメラで光の行きと返りを計測し、物体までの距離を測定します。プロジェクタ式
プロジェクタでさまざまなパターンの光を当てて、その歪みをカメラで読み取って立体を把握します。(2) 考える頭となるロボットビジョンコントローラ
視覚にあたる3Dカメラと頭脳に該当するロボットビジョンコントローラの構成をまとめて「3Dロボットビジョン」と総称します。
3Dカメラは画像を得るだけですが、ロボットビジョンコントローラは画像処理のほかに、多数のピースピッキング用のパレットを読み込み、機械学習とAI処理を行います。そこで3Dカメラで得た画像からピースパレットの内容物の状況を把握し、どのようにすればピースをピッキングできるかを判断し、ロボットハンドに指示します。
以上のような役割から、ロボットビジョンコントローラはピースピッキングロボットにおける頭脳といえるでしょう。
(3) 手となるロボットハンド
最後に、ピースピッキングロボットの手となるロボットハンド部分について紹介します。ロボットハンドは大きく分けて把持型、吸着型、ラバーアクチュエーター型、特化型の4つに分類されます。
①把持型ロボットハンド
把持型ロボットハンドは指に相当するグリッパでピースを挟み込むのが特徴です。一般的に駆動方式で「電動型ロボットハンド」と「空気圧型ロボットハンド」の2種類に分類されます。
また、図6のA〜Dで示すように、グリッパの形状やピースを挟む方法にもいくつか種類があります。
A:ピースを挟んで移送します。
B:ピース内面にグリッパを差込み、外側に広げて移送します。
C:グリッパを曲げられるようにし、2本のグリッパでピースを包み込むようにして移送します。AとCの違いは、Aの接触点が2点に対しCでは4点なのでより安定しやすい点です。
D:グリッパの指を3本とし、ピース全体を包み込むようにして移送します。
②吸着型ロボットハンド
吸着式ロボットハンドは、真空もしくは磁気によりピースを吸引します(図6のE)。「真空型ロボットハンド」か「磁力型ロボットハンド」のどちらを選ぶかは、ピッキングする対象の形状や材質などによって決めます。
③ラバーアクチュエーター型ロボットハンド
ラバーアクチュエーター型ロボットハンドは柔軟な素材でできた指を持っています。また、人間の手と同じように、傷つきやすいものや壊れやすいもの、袋状の不定形なものなどの取り扱いを得意としています。
④特化型ロボットハンド
特化型ロボットハンドは特定の作業のために専用で設計されたロボットハンドです。一般的に溶接や塗装の噴霧、ネジ止めなどで利用されます。
各ロボットハンドの種類や特徴、選び方については下記記事で詳しく解説しています。
ロボットハンドの種類とは?各種類の特徴や選定ポイント、メリット
3.ピースピッキングロボット導入にあたっての検討事項
ピースピッキングロボットを導入するにあたって、以下の点について検討しましょう。
(1)適切なロボットハンドを選ぶ
ピースピッキングロボットの手となるロボットハンドにはさまざまな種類があります。つかむ対象物に適合したロボットハンドを選ばなければ、製品や部品が破損したり、跡が残ってしまったりする可能性もあるでしょう。また、つかむのに時間がかかったり、途中で取り落としてしまったりすると、生産効率にも影響を与えかねません。
そのため、事前に取り扱う製品や部品に適したロボットハンドをしっかりと検討する必要があります。
(2)初期費用やランニングコストを検討する
一般的に、ピースピッキングロボット導入には次のようなコストがかかります。
・ピースピッキングロボットの導入・設置費用
・定期検査、オーバーホール、定期交換などの保全費用
・故障時の予備ロボットの台数分の費用
・緊急対応時の予備部品などの確保費用
このように、初期費用に加えてランニングコストも発生するため、費用対効果を検討しながら導入を進めましょう。
(3)リスクアセスメントを検討する
ピースピッキングロボットが人と協働で作業する環境下では、労働安全衛生法が定める基準に従ってリスクアセスメントを行い、人とロボットが安全に作業できるように検討する必要があります。
図7は、JIS B 9700「機械類の安全性−設計のための一般原則− リスクアセスメント及びリスク低減」を参考に簡略して描いたフロー図で、リスクアセスメントのステップフローについて紹介しています。
図上部の「リスクアセスメント」では以下の内容を行います。
・リスクアセスメントの進め方
・リスクアセスメント情報
・機械類の制限の決定
・危険源の同定
・リスク見積り
・リスク評価
詳細は、JIS B 9700 箇条5を参照しましょう。
まとめ
ピースピッキングロボットとは、人に代わって製品や部品といったピースを仕分けてつまみ取るロボットです。対象物の大きさや奥行きまで捉える3Dカメラ、画像から対象物を把握しどのように把持するか考えるロボットビジョンコントローラー、実際にワークをつかむロボットハンドなどにより構成されています。
ピースピッキングロボットの導入により、ピースピッキングの高速化・効率化が促進され、生産効率の向上が期待できます。また、単純作業にかかる人件費の削減も見込めます。
導入の際は、ワークにあった適切なロボットハンドを選ぶ、費用対効果を考える、リスクアセスメントを検討するといった点に注意しましょう。
ブリヂストンソフトロボティクスベンチャーズでは強さと柔らかさを兼ね備えたゴム人工筋肉「ラバーアクチュエーター」によって、ヒトの手のように多様なものを器用に掴むソフトロボットハンド「TETOTE」を開発しました。
「柔らかなモノをそっとつかむ」「複数のモノを持つ」「多種多様なモノをつかむ」を可能にしたことで、「つかめない」が原因で進まなかったピースピッキングの自動化を実現します。
ピースピッキングでお悩みの方は、ぜひお気軽にご相談ください。