従来の作業用ロボットから、柔軟な作業が可能で安全性の高い「協働ロボット」へのシフトチェンジが推進されています。人との共存や作業の協調とする協働ロボットが担う作業は、産業用ロボットよりもより複雑かつ柔軟性が求められます。
自動化や汎用化が難しいとされていた協働ロボットの課題を解決するための協働ロボット用ハンドが、ブリヂストンの開発した「TETOTE」です。
今回の記事では、協働ロボットの作業におけるロボットハンド選定で発生しがちな課題とともに、ブリヂストンの「TETOTE」について解説します。
ブリヂストンソフトロボティクスベンチャーズでは、ヒトの手のような器用さと柔軟さを兼ね備えたラバーアクチュエーター型ロボットハンド「TETOTE」を開発し、従来のロボットハンドでは困難とされていた大きさや形状、重さの異なるワーク操作を可能にしました。
「TETOTE」はピースピッキング分野における新たなスタンダードとして、今後の物流・産業界の自動化を支えていきます。
ぜひお気軽にご相談ください。

協働ロボットは従来の産業用ロボットに代わり、人との協働作業が実現できるロボットです。産業用ロボットよりも高い柔軟性や安全性が求められるため、ロボットハンド選定において多くの課題が発生します。協働ロボット用ハンドの選定において発生する3つの課題を解説します。
第一の課題は、協働ロボットが担う作業や取り扱うワーク毎に適した種類のロボットハンドを用意しなければならない点です。
従来の産業用ロボットと異なり、協働ロボットは人と一緒に作業を行うことで、より複雑かつ柔軟性の高い作業ができます。また、単純作業だけでなく、複合的な作業も可能となります。そのような複数の工程や複雑な作業を担わせるためには、それぞれの環境や状況に適した異なるロボットハンドが必要です。
ロボットハンドは協働ロボットのロボットアームの先端に付けることで、つかむ、運ぶといった作業を可能とします。ロボットハンドにはさまざまな種類があり、協働ロボットが担う作業や取り扱うワークによって異なる種類のロボットハンドが存在しています。
協働ロボット1台のみでも、ロボットハンドを付け替えることで複数の作業が実現できますが、その分異なる種類のロボットハンドの選定と購入が必要です。たとえばワークをつかんで移動し、離すピッキング作業と、溶接や加工のためにワークを把持する作業を同じ協働ロボットが担う場合、作業内容に応じたロボットハンドの導入と付け替えが求められます。
第二の課題は、協働ロボットが取り扱うワークによっては器用さが発揮できるロボットハンドの導入が求められる点です。
たとえば産業用ロボットは単純作業のみであり、取り扱うワークも単一であるためしっかりとつかむ把持力があれば問題ないはずです。一方、協働ロボットは食品や医薬品といった変形しやすいワークやデリケートなワークを取り扱う場合もあります。そのため、そのワークの取り扱いに適した、人間の手のような柔軟な把持力が求められます。
ロボットハンドには、把持力の高さを重視した把持型ロボットハンドと、磁力を使ってデリケートなワークも壊さないように把持できる吸着型ロボットハンド、さらにやわらかく柔軟性の高い素材を使用することで、人間の手のような繊細な把持も可能としたソフトロボットハンドがあります。
下記記事ではロボットハンドの種類や選び方について紹介しているので参考にしてみてはいかがでしょうか。
ロボットハンドとは?種類、構成要素、選定方法、活用事例を解説
第三の課題は、協働ロボットを導入する上での安全性の確保です。
大規模、かつ大量生産の製造ラインに組み込まれることの多い産業用ロボットは、作業にともなう危険エリアに人が立ち入らないよう安全柵の設置が義務付けられています。一方、協働ロボットは人との共同作業や調和を前提としているため、基本的に安全柵が不要で設置場所を選ばず、人間と同じ場所での作業も実現できます。
ただし、それだけロボットハンドにも高い安全性が求められます。前述の作業の汎用性や把持力の柔軟性といった課題がクリアできても、人への安全性が担保できなければ、人と協働ロボットを隔離して作業せざるをえないため、協働ロボットの持つメリットを活かせないことになります。
ここまで協働ロボット用ハンドの3つの課題点について解説してきました。次に、これらの課題を克服したブリヂストンの協働ロボット用ハンド「TETOTE」について詳しくみていきましょう。
協働ロボットが人と協働するうえで発生するロボットハンドの課題を解決したのが、ブリヂストンソフトロボティクスベンチャーズの協働ロボット用ハンド「TETOTE」です。ここでは「TETOTE」の特徴について解説します。
「TETOTE」の素材には、ラバーアクチュエーターを採用しています。ラバーアクチュエーターとは、ブリヂストンの持つゴム素材の研究開発のノウハウを活用して開発されたゴムの人工筋肉です。タイヤや油圧ホースの技術を適用したゴムチューブと、高強度繊維のスリーブから構成されています。
ラバーアクチュエーターは軽量ながら高出力、柔軟性が高い、外部からの衝撃に強いといった特性を持っています。「TETOTE」の素材としてのほか、EV対応充電などの人とロボットの協働へのさまざまな用途への応用が期待されています。
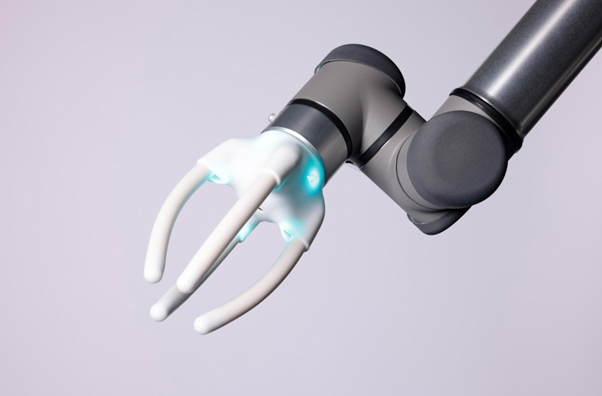
「TETOTE」は、人間の手のように「いい感じ」の力加減でものをつかめるロボットハンドです。ワークのサイズや形状、硬度に応じてさまざまなワークに対応できます。従来の「つかむ」だけでなく「そっと包む」というような把持も実現できるのが大きな特徴です。
「TETOTE」はラバーアクチュエーターを使用した指の部分をシリコンカバーで包むことで、ゴム人工筋肉の持つしなやかさに感触としての柔らかさを加えたデザインを実現しました。「思わず触りたくなる、握手したくなる」存在として、ブリヂストンのソフトロボティクス ベンチャーズが目指す「ヒトとロボットが共存・協働する社会の実現」に向けた新たな挑戦を象徴したデザインとなっています。創造的なデザインが評価され、2023年度グッドデザイン賞も受賞した実績もあります。

ブリヂストンの持つ技術を取り入れたゴム人工筋肉を材質として取り入れることで、「TETOTE」は協働ロボット用ハンドの新しい可能性を見出す、人でもロボットでもない「第三の手」と位置づけられています。「TETOTE」で解決できる協働ロボット用ハンドの課題について解説します。
ゴム人工筋肉であるラバーアクチュエーターは、多様なワークになじむ柔らかさを持っています。ワークのサイズや硬度を問わずに幅広いワークの取り扱いができるため、複数のワークを取り扱う作業も可能です。ワーク別にロボットハンドを購入、付け替えする必要がないためコスト削減や効率化につながるでしょう。
「TETOTE」はまるで人間の手のように、いい感じの加減でワークをつかむ、移動させる、包む、といった動きが可能です。壊れやすい、崩れやすい繊細なワークの取り扱いができます。また、柔軟な指先の動きによってニットをつむぐような作業も可能です。ロボティクスが苦手とする繊細な作業も「TETOTE」が実現します。
「TETOTE」は多様なワーク、複雑な複数の作業を担当できることから、ワークの種類や作業内容に応じたロボットハンドを用意する必要がありません。協働ロボットの作業の汎用性を高められるため、工程の大幅な自動化も実現できます。
ラバーアクチュエーターを採用することで、ロボットハンド自体が破損や外部衝撃に強いのはもちろん、万が一人にぶつかっても怪我をしにくく、物にぶつかっても壊れにくい特徴があります。そのため、安全柵を設けずに人と協働で作業するときにも、高い安全性を発揮できます。まるで握手したくなる、安心感のあるデザインも魅力です。
「TETOTE」には、自社で導入済みの協働ロボットへ導入できるプランや導入検討ができるレンタルプラン、さらにこれから協働ロボットの導入を検討している企業への検証プランも用意されています。
自社で取り扱うワークに対して、「TETOTE」を使った検証ができるプランもあります。実際の工場や作業現場で検証を行うだけでなく、ブリヂストンの自社ラボにワークを送付いただいた上で、自社ラボで検証を行うことも可能です。
自社で協働ロボットに担わせる作業や取り扱いワークに適しているかどうかを事前に検証できるので、協働ロボット用ハンド導入後に「こんなはずでは」と失敗することもないでしょう。
ブリヂストンの協働ロボット用ハンド「TETOTE」は高い汎用性と柔軟性から、多くの分野に導入されている実績があります。TETOTEの協働ロボット用ハンドへの活用事例を解説します。
自動車、部品、電子機器などの製造工場にて、多様なワークのピッキングや配置を行う協働ロボットのロボットハンドとして導入されています。金属から樹脂と異なる素材の部材はもちろん、異なる重量やサイズ、形状が混在する多様なワークを確実かつ正確にピッキング可能です。
ピースピッキングデモ 部品篇
メーカー物流や3PLの物流倉庫にてトータルピッキング、梱包前の摘み取りピッキングといった幅広い部品のピッキング工程の協働ロボット用ハンドとして取り入れられています。多様なワークを取り扱える柔軟性の高さに加えて、ちょうど良い把持力による丁寧で効率的なピッキング作業を実現させています。
【ブリヂストン ソフトロボットハンド】 ピースピッキングロボットシステム - 棚からピッキング編
食品工場で取り扱うさまざまな食品を傷つけず、崩さずといった丁寧かつ繊細なピッキング作業を担っています。お菓子や乳製品の製造工程のほか、中食惣菜の盛り付け作業も可能です。
【ブリヂストン ソフトロボティクス】 ピースピッキング知能ロボットデモ デイリー食品篇
協働ロボットで発生しがちなロボットハンドの課題と、それを解決できるブリヂストンのソフトロボットハンド「TETOTE」の特徴や協働ロボットへの導入事例について解説しました。
協働ロボット用ハンドでは、以下の3点の課題があります。
・作業毎に適したハンドを取り付ける必要がある。
・保持力に器用さが求められる。
・安全性の確保が必要。
これらの課題を克服したのが、ブリヂストンのソフトロボットハンド「TETOTE」です。「TETOTE」はラバーアクチュエーターによる人工筋肉だからこその繊細な把持や作業、ちょうど良い力加減、そして高い安全性を発揮できるロボットハンドです。
幅広いワークの取り扱いに長けており、繊細な力で掴むため複雑な作業や複数の作業も可能です。また、ぶつかっても怪我をしにくいため人との協働に向いています。導入への検証段階から相談できるため、導入後のギャップで失敗することもないはずです。
人間と協働できるロボットを実現するために、「TETOTE」の導入を検討してみてはいかがでしょうか。

