ロボットハンドは、工場における作業の安全確保、工程品質の改善、生産性の向上のために非常に有効なツールです。ロボットハンドにはいくつか種類があり、用途や目的に合わせて適切に使い分ける必要があります。本記事では、ロボットハンドの種類や特徴、導入における課題をご紹介すると共に、ロボットハンド選定のためのポイントをご紹介します。
ブリヂストン ソフトロボティクス ベンチャーズでは、ヒトの手のような器用さと柔軟さを兼ね備えたラバーアクチュエーター型ロボットハンド「TETOTE」を開発し、従来のロボットハンドでは困難とされていた大きさや形状、重さの異なるワーク操作を可能にしました。
「TETOTE」はピースピッキング分野における新たなスタンダードとして、今後の物流・産業界の自動化を支えていきます。ぜひお気軽にご相談ください。
ロボットハンドは用途に応じて種類や特徴の異なるさまざまなタイプが開発されており、ロボットハンドの機種選定にはそれらの特徴を理解する必要があります。
主要なロボットハンドの種類とそれぞれの特徴について詳しく解説します。
把持型ロボットハンドは、人間の手のような指を持ち、ワークを掴むことで移動や回転操作を行えます。電動型や空気圧型などの種類があります。
電動型ロボットハンドは、駆動にモーターを使用するロボットハンドです。
プログラム制御による複雑な命令によって、異なる形状のワークであっても、指の開き具合や把持の力加減を調整することが可能です。
空気圧型ロボットハンドは、駆動に空気圧を使用するロボットハンドです。
シンプルな構造が特徴で、供給する空気圧を調整することで把持力を簡単に調整可能な上、単純な構造ゆえにメンテナンス性にも優れます。
吸着型ロボットハンドは、ワークをつかむのではなく、吸引力や磁力を利用して移動操作を行うロボットハンドです。
真空型と磁力型の2種類が広く利用されています。
真空型ロボットハンドは、パッド内を真空にしてワークを吸着させ、ワークを持ち上げるロボットハンドです。
ガラスや金属の板など把持型では操作し難い大きなワークに対応可能であるうえ、指を開閉することなく持ち上げ下ろしが可能なため、素早い操作が可能という特徴があります。
ただし、パッドをワーク表面と密着させる必要があるため、ワーク表面は平滑で凹凸がなく、多孔のない表面であることが求められます。
磁力型ロボットハンドは、ワークの吸着に磁石を利用するロボットハンドです。
ワーク表面に多少の凹凸があっても磁力により吸着ができれば持ち上げられるというメリットがありますが、その反面ワークが磁性体でなければ持ち上げられないというデメリットもあります。
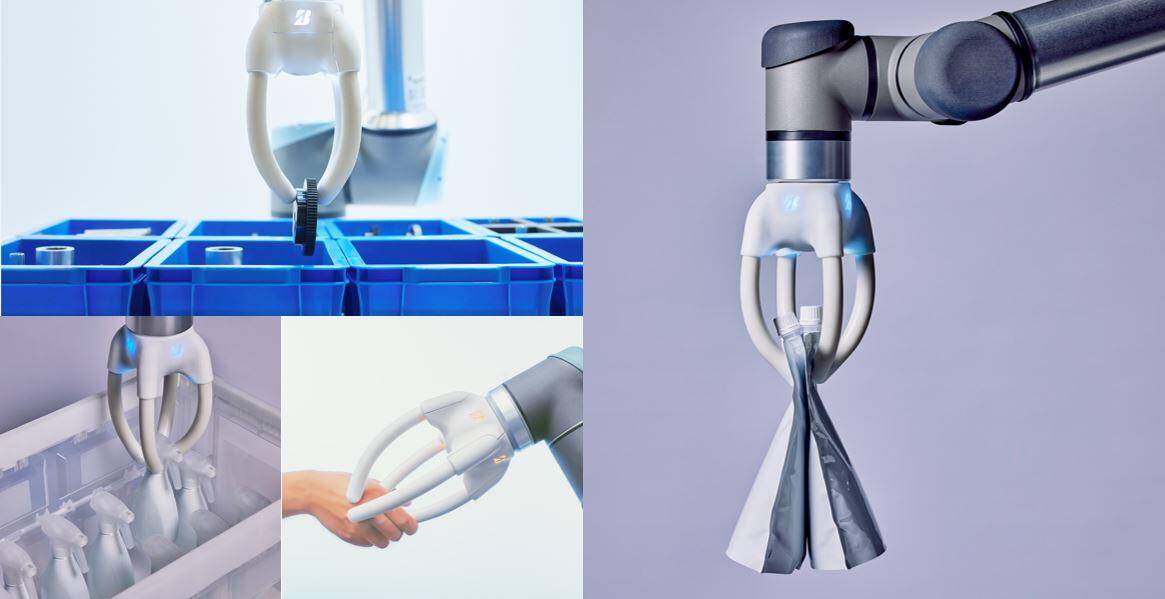
ワークを掴む指にあたるパーツを柔らかい素材にすることで、人間の手に近い把持性能を持たせたものがラバーアクチュエーター型ロボットハンド、別名ソフトロボットハンドです。
柔軟な素材でできた指でワークを柔らかく包み込むように把持できるため、果物や精密機器など傷がつきやすいワークや壊れやすいワーク、パウチや袋状の不定形なワークの取扱いに優れているのが特徴です。
ラバーアクチュエーターについては以下の動画で詳しく解説しています。
ラバーアクチュエーター技術紹介映像 FULL
また、ラバーアクチュエーターを利用したロボットハンドの例は以下が参考になります。
ピースピッキングデモ 部品篇
特殊な工具を用いる作業や特殊な形状のワークの取扱いに特化したロボットハンドは、特化型ハンドロボットと呼ばれています。
特定の作業やワーク向けの専用設計とすることで動作を最適化し、効率的に作業を行うことが可能です。
自動車組立工程における溶接や塗装液の噴霧、ネジ止めなど工業分野における生産ラインで多く使用されています。
作業効率や生産性を向上させるべくロボットハンドを選定する場合に、注目すべきポイントを詳しく説明します。
ロボットハンドがワークを落としてしまうのはもちろん、強く把持しすぎてワークを壊してしまってはいけません。ロボットハンドの選定には、ワークの重量や材質、形状に適した把持力や吸着力を持つロボットハンドを選ぶ必要があります。
また、水やオイルによる濡れがある場合はそれらも考慮して選定することも重要です。
ロボットハンドの把持速度も、生産ラインの効率化においては重要な要素です。例えば把持型のロボットハンドは指の開閉に時間を要するのに比べて、吸着型のロボットハンドは圧空バルブの開閉や電磁石のオンオフで把持が行えるため、把持速度が早い傾向にあります。
把持にかかる時間の差はわずかであっても、大量生産においては全体で大きなタイムロスとなってしまいます。
繰り返しワークを操作するロボットハンドにおいて、把持力や把持速度の制御精度も重要なパラメータです。
繰り返しのワーク把持や位置決めにおいては、空気圧型よりも電動型の方が優れた制御精度を持ちます。
ロボットハンドの汎用性も重要な選定ポイントです。特にワークの内容が数種類に及ぶ場合には、汎用性が高いロボットハンドを選択する必要があります。
アタッチメントなどにより、予定しているワークに十分対応可能であるかを確認するだけでなく、将来の生産計画も加味して選定することが重要です。
ロボットハンドの材質も選定時に考慮すべき点です。把持の対象となるワークに合わせたロボットハンドの選定を行わないと、ワークに傷をつけたり、材質によりワークを劣化させてしまったり、滑ってワークを落としてしまうなどのリスクがあります。
ロボットハンドの材質とワークの相性をよく加味して選定しましょう。
ロボットハンドは精密機械であり、設置する作業環境も選定時には重要な要素となります。作業環境の温度や湿度、ワークや周囲の振動、粉塵の有無などの環境条件に適したロボットハンドを選択できれば、長期的な安定稼働を期待できます。
また、ロボットハンドだけでなくケーブルコネクタや配線ジョイントボックスなど、機器トータルでの保護が設備導入には重要です。
ロボットハンドのメンテナンス性は、長期的なコスト削減と安定稼働を実現する上で欠かせません。駆動部品をはじめとする消耗品の日常点検に加え、故障の際、部品交換が容易に行えるかは検討すべきでしょう。
また、作業エリアのレイアウトも、メンテナンス性が確保されたものであることが重要です。さらに交換部品の入手性や、修理の内製化が可能かといった視点も必要となります。
従来人間の作業者が行っていた作業をロボットハンドで代替することは、作業効率や生産性の向上に加えて、工場という危険な環境においては作業者の安全にも寄与します。
製造現場における重要な方針である「安全第一」を守りつつ製造品質を高く保つことができる、ロボットハンド導入のメリットについて詳しく見ていきましょう。
重いワークや有害な化学物質を取り扱う現場など、作業者に危険が及ぶ環境でもロボットハンドの活躍が期待されます。危険な作業を人間がせずに済むことは労働安全の観点において重要なメリットです。
また、人間の作業者にありがちな、作業や危険に対する慣れから所定の安全手順を飛ばしてしまう近道行動や、長時間作業による疲れから生じるミスについても、プログラムに忠実に作業をこなすロボットハンドの導入により対策できます。
繊細で高い精度が要求される作業においても、ロボットハンドに優位性があります。ロボットハンドなら精度を維持したまま繰り返し同じ作業を行えるため、作業や製品の品質を一定に保つことができます。
また、熟練の作業者が行っていた作業を手順化しロボットハンドに実行させられれば、作業者による品質の差もなくなります。
高精度な作業の繰り返しや作業者の熟練度に左右される生産現場などは、ロボットハンドを導入するメリットが大きいでしょう。
ロボットハンドの導入により作業スピードが均一化し、生産性の向上が期待できます。また、より高度な作業に人員を割り当てたり、作業者数の急な変更等のトラブルも減るため、生産計画通りの工場運用が可能となるなどの利点もあります。
ロボットハンドを導入することで単純作業を省人化できるため、人件費の削減に貢献します。また、経験の浅い作業者に必要なトレーニング期間を省略できるのも大きなメリットです。
ロボットハンドの導入には多くのメリットがありますが、一方でいくつかの課題も存在します。ロボットハンドによる効率化にはその課題を理解し、適切に解決していくことが重要です。
ここでは、ロボットハンドの導入に際して考慮すべき主な課題について詳しく説明します。
ロボットハンドの効果的な運用には、専門知識を持った技術者が不可欠です。
ロボットハンドの動作プログラミングのみならず、ロボットハンドそのものや搭載作業具の交換、誤作動や故障に対する対応など、知識とスキルを持つ作業者が必要です。また、自己流での作業やトラブルへの対処は故障リスクや欠陥製品を生むだけでなく、作業者の怪我などの災害リスクを引き起こす可能性もあります。
定期的なメンテナンスなど必要な作業を外部委託しつつ、社内技術者の雇用も進めましょう。
ロボットハンドや作業の種類によっては、ロボットの稼働範囲を含めた広い作業スペースが必要になります。ロボットハンドに安全装置が組み込まれていても、基本的には作業機械であり、人間の作業者と作業エリアを共有することは労働安全上好ましくありません。
そのため、ロボット周囲への安全柵の設置や他工程の動線との干渉を考慮した機械レイアウトなどの制約が生じます。(図2)
場合によっては人間の作業者が行うよりも広い作業スペースが必要になる可能性もあるでしょう。
図2 ロボットの可動範囲と作業動線の干渉
高精度な作業に向いているロボットハンドでも、繊細な作業には不向きな場合もあります。例えばピッキングのようにさまざまな大きさや形状の製品を取り扱う場合、最適な把持力は掴む製品により異なるため、適切に把持できない場合があります。
一方、柔軟性のあるソフトロボットハンドの登場により、人間の手のように適切な力加減での把持が可能となり、この課題は改善されつつあります。
ブリヂストンソフトロボティクスベンチャーズでは強さと柔らかさを兼ね備えたゴム人工筋肉「ラバーアクチュエーター」によって、柔らかなモノをそっと掴んだり、多種多様なモノを適切な力で掴むことを可能にしました。ヒトのような器用さが求められるピッキング作業の自動化を、全く新しい汎用的なロボットハンドが実現します。
ピースピッキングロボットシステム - 棚からピッキング編
ロボットハンドの種類は大きく分けて4つに分類できます。
①把持型ロボットハンド
②吸着型ロボットハンド
③ラバーアクチュエーター型ロボットハンド
④特化型ロボットハンド
用途に応じて最適なロボットハンドを選定すれば、工場や倉庫での作業の安全性、製品の品質、生産性の向上に大きなメリットをもたらします。
また、ロボットハンドを選ぶ際は以下のポイントに注目しましょう。
・ワークに適した把持力・吸着力
・把持速度
・制御速度
・汎用性
・材質
・設置環境
・メンテナンス性
ブリヂストンソフトロボティクスベンチャーズでは、ヒトの手のような器用さと柔軟さを兼ね備えたラバーアクチュエーター型ロボットハンド「TETOTE」を開発し、従来のロボットハンドでは困難とされていた大きさや形状、重さの異なるワーク操作を可能にしました。
「TETOTE」はピースピッキング分野における新たなスタンダードとして、今後の物流・産業界の自動化を支えていきます。
ぜひお気軽にご相談ください。

